
1 .1 বৈশিষ্ট্যগুলি
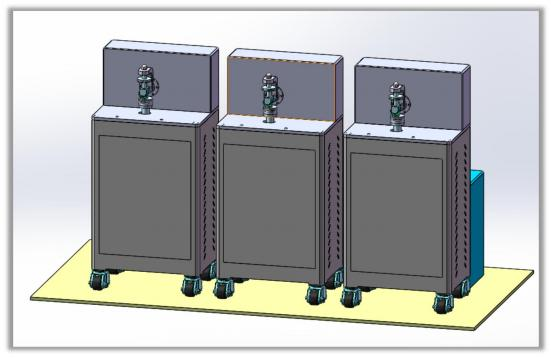
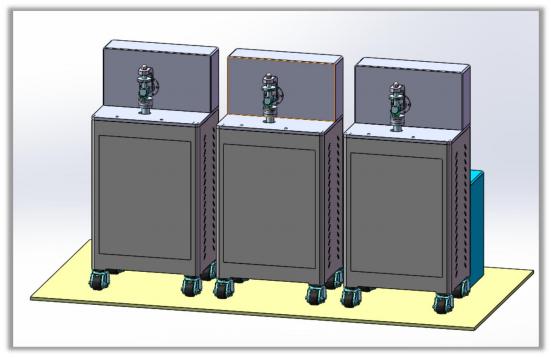
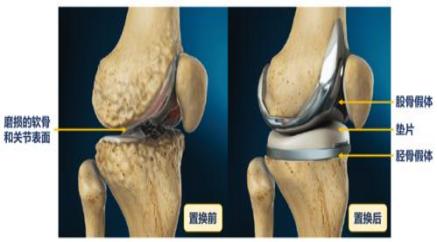
HH3 হাঁটু জয়েন্ট পরিধান পরীক্ষক তিনটি অংশ নিয়ে গঠিত: টেস্ট হোস্ট, ফিক্সচার এবং ইলেকট্রনিক নিয়ন্ত্রণ অংশ৷ এটি হাঁটু ইমপ্লান্ট এবং অন্যান্য ক্ষতি প্রক্রিয়ার পরিধান, ক্লান্তি এবং পিলিং অনুকরণ করতে পারে এবং একই সময়ে ইমপ্লান্টে 3টি হাঁটু জয়েন্ট পরীক্ষা করতে পারে। এই টেস্টিং মেশিনটি স্বয়ংক্রিয়ভাবে পরীক্ষার শক্তি, পরীক্ষার সময় এবং গতি নিয়ন্ত্রণ করে এবং রিয়েল টাইমে পরীক্ষার শক্তি এবং টর্ক পরিমাপ করে। এটি হাঁটু যৌথ প্রস্থেসেস এবং অন্যান্য সম্পর্কিত চিকিৎসা ক্ষেত্রের উত্পাদন, ব্যবহার এবং গবেষণার জন্য প্রযোজ্য।
স্পিন্ডল ড্রাইভ আমদানি করা এসি সার্ভো মোটর এবং নিয়ন্ত্রণ ব্যবস্থা গ্রহণ করে, যা স্টেপলেস গতি নিয়ন্ত্রণ করতে পারে এবং প্রয়োজনীয় গতির সীমার মধ্যে ধ্রুবক টর্ক/ধ্রুবক অক্ষীয় বল আউটপুট গণনা করতে পারে; একটি স্ক্রু স্প্রিং লোডিং সিস্টেম ব্যবহার করে পরীক্ষা বল প্রয়োগ করা হয়। পরীক্ষা বল স্থিরভাবে এবং নির্ভরযোগ্যভাবে প্রয়োগ করা হয়, এবং পরীক্ষা বল কম্পিউটার ইন্টারফেসে অপারেটর দ্বারা সেট করা যেতে পারে; স্পিন্ডেল গতি, পরামিতিগুলি যেমন বিপ্লবের সংখ্যা, পরীক্ষার শক্তি এবং পরীক্ষার সময় সবই একটি কম্পিউটার দ্বারা নিয়ন্ত্রিত হয়, যা বাস্তব সময়ে পরীক্ষার ডেটা সংগ্রহ করতে পারে এবং সেগুলি প্লট করতে পারে। সংশ্লিষ্ট পরীক্ষার বক্ররেখা তৈরি করা যেতে পারে, এবং পরীক্ষার ডেটা বা বক্ররেখা সংরক্ষণ, পুনরুদ্ধার এবং ইচ্ছামত মুদ্রণ করা যেতে পারে।
সম্পূর্ণ জয়েন্ট এপি, ঘূর্ণন, ফ্লেক্সন অপহরণ এবং অন্যান্য নড়াচড়ার জন্য বিভিন্ন উপাদান সহ ত্রি-মুখী সার্ভো মোটর চালিত লোডিং সিস্টেম, চার-কম্পোনেন্ট ফোর্স সেন্সর মডিউল টর্ক অক্ষীয় বল, অনুভূমিক থ্রাস্ট এবং টর্কের সময় যথাক্রমে টর্কের পরীক্ষা করে , তিন উপায় সার্ভো সমাবেশ সজ্জিত উচ্চ-নির্ভুল ঘূর্ণমান এনকোডার, রিয়েল-টাইম কোণ পরিমাপ, এবং স্থানচ্যুতি সহ এবং হোস্ট কম্পিউটার নিয়ন্ত্রণের জন্য একটি কার্যকর ডেটা উৎস প্রদান করে।
প্রতিটি গতি প্রক্রিয়া স্বাধীনভাবে নিয়ন্ত্রিত এবং সমন্বিত, তিনটি স্টেশন এবং 15টি অক্ষ সহ জয়েন্ট কম্পোনেন্টের ক্ষতি পরীক্ষা সম্পূর্ণ করার জন্য।
1.2 প্রধান স্পেসিফিকেশন
1. চাইনিজ অপারেশন ইন্টারফেস সহ ইন্সট্রুমেন্ট অপারেশন সফ্টওয়্যার।
2. ইন্সট্রুমেন্ট চলমান সফ্টওয়্যার ব্যবহারের জন্য প্রস্তুত, কোনো বিশেষ সফ্টওয়্যারের প্রয়োজন নেই৷
3. স্বাধীনতার ডিগ্রী: প্রতিটি পরীক্ষা স্টেশন বাঁক / এক্সটেনশন, অভ্যন্তরীণ ঘূর্ণন / বাহ্যিক ঘূর্ণন, এগিয়ে / পিছনের গতিবিধি, ত্রিমাত্রিক গতি নিয়ন্ত্রণ, এবং অক্ষীয় বল লোডিং উপলব্ধি করতে পারে এবং স্বাধীনতার প্রতিটি ডিগ্রি হতে পারে নিয়ন্ত্রিত সেন্সর এবং বল উভয়ই সনাক্ত করা হয়; অভ্যন্তরীণ/বাহ্যিক দিক এবং অভ্যন্তরীণ/বাহ্যিক দিকে অবাধ চলাচল সম্ভব।
4. সেন্সরের অরৈখিকতা সম্পূর্ণ স্কেলের 0.10% এর বেশি নয় এবং হিস্টেরেসিস 0. 10% এর বেশি নয়, পুনরাবৃত্তিযোগ্যতা সম্পূর্ণ স্কেলের 0.05% এর বেশি নয়৷
5. স্থানচ্যুতি এবং স্থানচ্যুতি সেন্সর পরিসর: অক্ষীয় স্থানচ্যুতি 100 মিমি, ফ্লেক্সিয়ন/এক্সটেনশন 120, অভ্যন্তরীণ ঘূর্ণন/বহিরাগত ঘূর্ণন 20, অগ্রগতি / পশ্চাৎপদ স্থানচ্যুতি 15 মিমি, মধ্যবর্তী / ভাল / পার্শ্বীয় স্থানচ্যুতি 5 মিমি।
6. লোড ক্ষমতা এবং ফোর্স সেন্সর পরিসীমা: অক্ষীয় লোড 3KN , অভ্যন্তরীণ / বাহ্যিক টর্ক 20Nm , ফরোয়ার্ড / ব্যাকওয়ার্ড লোড 1KN৷
7. বল এবং স্থানচ্যুতি নিয়ন্ত্রণের নির্ভুলতা: একটি চক্রের মধ্যে বল এবং স্থানচ্যুতি প্রশস্ততার ত্রুটি নির্দিষ্ট সর্বাধিকের বেশি হবে না সর্বোচ্চ ফেজ ত্রুটি সম্পূর্ণ চক্রের 3% অতিক্রম করবে না৷ প্রতিটি নিয়ন্ত্রণযোগ্য স্বাধীনতা ডিগ্রীতে যন্ত্রটি ISO 14243-1 এবং ISO 14243-3 অনুযায়ী পরীক্ষা করা হয়। বল এবং স্থানচ্যুতি সেন্সরগুলির পরিমাপকৃত বক্ররেখা এবং বিচ্যুতি মান।
8. এটিতে আট-চ্যানেল এনালগ ইনপুট ফাংশন রয়েছে এবং বাহ্যিক ডেটার সাথে সিঙ্ক্রোনাইজ করা যেতে পারে৷
9. পরীক্ষার ফ্রিকোয়েন্সি: 1Hz, নির্ভুলতা 0.1Hz।
10. কন্ট্রোল সিস্টেম: এটি একটি পৃথক মাল্টি-স্টেশন, মাল্টি-চ্যানেল সার্ভো কন্ট্রোলার দিয়ে সজ্জিত করা উচিত যাতে শক্তি এবং স্থানচ্যুতির বন্ধ-লুপ স্বয়ংক্রিয় নিয়ন্ত্রণ অর্জন করা যায়।
11. নিয়ন্ত্রণ নির্দেশ হিসাবে একটি চক্রীয় তরঙ্গরূপ ব্যবহার করা হলে সিগন্যালের জন্য প্রয়োজনীয় সর্বোচ্চ মান নির্ভুলভাবে পৌঁছাতে পারে তা নিশ্চিত করতে নিয়ামককে পিক-টু-ভ্যালি মান নিয়ন্ত্রণ ক্ষতিপূরণ সম্পাদন করতে সক্ষম হওয়া উচিত৷
12. এটি কাস্টম গেট কার্ভের প্রোগ্রামিং টেস্টিং বাস্তবায়ন করতে সক্ষম হওয়া উচিত; স্বাধীনতার প্রতিটি নিয়ন্ত্রণযোগ্য ডিগ্রির ধাপে ধাপে ম্যানুয়াল নিয়ন্ত্রণ করতে সক্ষম হওয়া; এবং এক্সেল বিন্যাসে কাঁচা ডেটা রপ্তানি করতে সক্ষম হবেন।
13. পরীক্ষার সময়, সফ্টওয়্যারটি রিয়েল টাইমে প্রতিটি স্টেশনের বল এবং স্থানচ্যুতি বক্ররেখা এবং নিয়ন্ত্রণ ব্যবস্থা প্রতিফলিত করতে সক্ষম হওয়া উচিত৷ সিস্টেমটি ম্যানুয়াল হস্তক্ষেপ ছাড়াই লক্ষ্য বক্ররেখার সাথে মেলে স্বয়ংক্রিয়ভাবে নমুনার গতি বক্ররেখা সামঞ্জস্য করতে সক্ষম হওয়া উচিত৷
14. রিয়েল-টাইম ক্লোজড-লুপ কন্ট্রোল রেট ≤ 6kHz, বল এবং স্থানচ্যুতি নিয়ন্ত্রণ মোড ব্যতীত, নিয়ামক গণনা করা পরিবর্তনশীল নিয়ন্ত্রণ মোড প্রয়োগ করতে সক্ষম হওয়া উচিত৷
15. ডিজিটাল স্যাম্পলিং ফ্রিকোয়েন্সি 100 kHz এর কম হওয়া উচিত নয় এবং নমুনা পদ্ধতিতে অন্তর্ভুক্ত করা উচিত: সর্বোচ্চ মান, উপত্যকার মান, সময় সময়, সর্বোচ্চ, সর্বনিম্ন, গড় , চক্র / লগারিদম ইত্যাদি৷
16. এতে ডুয়াল মোড, চ্যানেল ফিডব্যাক লিমিট চ্যানেল কমান্ড ওয়ার্কিং মোড রয়েছে৷
17. এতে অনুপস্থিত সেন্সর উত্তেজনা স্ব-পরীক্ষা করার কাজ রয়েছে৷
18. তাপমাত্রা: লুব্রিকেটিং মাঝারি তাপমাত্রা (37 ℃) এ বজায় রাখা যেতে পারে এবং একটি তাপমাত্রা নিয়ন্ত্রণ ব্যবস্থা রয়েছে৷
19. লুব্রিকেটিং মাধ্যম : জয়েন্ট পৃষ্ঠকে লুব্রিকেটিং মিডিয়ামে নিমজ্জিত করা যেতে পারে এবং লুব্রিকেটিং মাধ্যমটি ফুটো ছাড়াই সিল করা উচিত; এবং একটি ফুটো মনিটরিং ডিভাইস দিয়ে সজ্জিত.
20. পরীক্ষার উপাদান: পরীক্ষার জন্য প্রয়োজনীয় টুলিং দিয়ে সজ্জিত, ওয়ার্কস্টেশন লোড করা এবং সমস্ত নড়াচড়ার জন্য নিমজ্জন ওয়ার্কস্টেশন সরঞ্জাম ক্রমাঙ্কন এবং সমস্যা সমাধানের জন্য রেফারেন্স স্ট্যান্ডার্ড নমুনা সরবরাহ করে৷
21. জরুরী স্টপ বোতাম: সরঞ্জামগুলি একটি জরুরি স্টপ বোতাম দিয়ে সজ্জিত করা উচিত।
22. নিরাপত্তা সুরক্ষা: সরঞ্জাম একটি পরিষ্কার এবং স্বচ্ছ থার্মোপ্লাস্টিক পলিকার্বোনেট উপাদান সুরক্ষামূলক আবরণ দিয়ে সজ্জিত করা উচিত; একটি নিরাপত্তা ইন্টারলক ডিভাইস আছে। যখন প্রতিরক্ষামূলক কভার দরজা খোলা হয়, তখন সরঞ্জামগুলি স্বয়ংক্রিয়ভাবে পরীক্ষা বন্ধ করতে সক্ষম হওয়া উচিত।
1.3 কাজের শর্তগুলি
ঘরের তাপমাত্রা 10 ℃~ 35 ℃ এর মধ্যে;
আপেক্ষিক আর্দ্রতা 80% এর বেশি নয়;
একটি শক্ত ভিত্তির উপর সঠিক ইনস্টলেশন;
কম্পন, ক্ষয়কারী মিডিয়া এবং শক্তিশালী ইলেক্ট্রোম্যাগনেটিক ক্ষেত্রের হস্তক্ষেপ ছাড়াই একটি পরিষ্কার পরিবেশে;
পাওয়ার সাপ্লাই ভোল্টেজের ওঠানামার পরিসীমা রেট করা ভোল্টেজের বেশি হওয়া উচিত নয়  10%।
10%।
2. স্ট্রাকচারাল কম্পোজিশন
টেস্ট মেশিনটি তিনটি ওয়ার্কস্টেশনে বিভক্ত, যেগুলি হল স্পিন্ডেল ড্রাইভ সিস্টেম, নমুনা লোডিং সিস্টেম এবং অক্ষীয় বল তিনটি ওয়ার্কস্টেশন একই স্পিন্ডেল ড্রাইভ শেয়ার করে৷ গতিশীল সিস্টেম এবং সফ্টওয়্যার নিয়ন্ত্রণ ব্যবস্থা।
2.1 স্পিন্ডল ড্রাইভ সিস্টেম
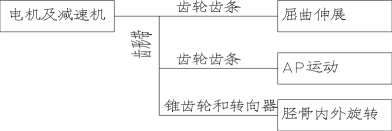
অক্ষ মোটর Panasonic AC servo সমন্বিত গতি নিয়ন্ত্রণ ব্যবস্থা এবং মোটর ব্যবহার করে৷ সর্বাধিক মোটর শক্তি 7.5 কিলোওয়াট, এর শক্তি 3 আউটপুট লাইনে বিভক্ত।
প্রথমটি: গিয়ার র্যাক, ইলেক্ট্রোম্যাগনেটিক ক্লাচ এবং টর্ক সেন্সরের পরে, এটি ফিমারের ঘূর্ণায়মান পেন্ডুলামে পরিণত হয়। ইলেক্ট্রোম্যাগনেটিক ক্লাচ শক্তি চালু এবং বন্ধ নিয়ন্ত্রণের জন্য দায়ী এবং টর্ক সেন্সর এর জন্য দায়ী টর্ক পরিমাপ অপারেশন চলাকালীন টর্ক পরিমাপ করুন।
দ্বিতীয়টি: দাঁতযুক্ত বেল্ট এবং গিয়ার র্যাকের মধ্য দিয়ে যাওয়ার পরে, এটি বাম এবং ডানে পারস্পরিক অনুবাদে পরিণত হয়, নমুনা AP মুভমেন্ট চালায়৷
তৃতীয়টি: দাঁতযুক্ত বেল্ট, বেভেল গিয়ার এবং স্টিয়ারিং গিয়ারের মাধ্যমে, এটি টিবিয়ার ঘূর্ণনশীল সুইংয়ে রূপান্তরিত হয়, নমুনাটিকে ভিতরের দিকে এবং বাইরের দিকে ঘোরানোর জন্য চালিত করে৷
ট্রান্সমিশন রুট নীচের চিত্রে দেখানো হয়েছে৷
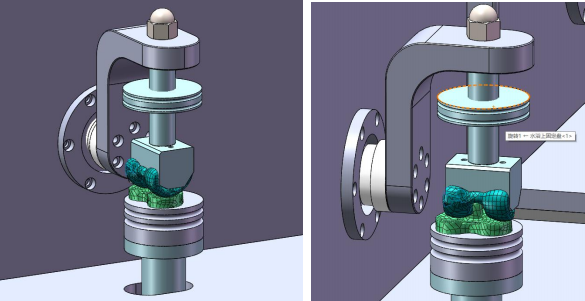
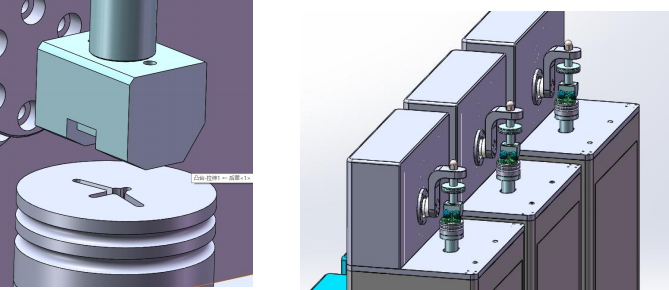
2.2 নমুনা লোডিং সিস্টেম
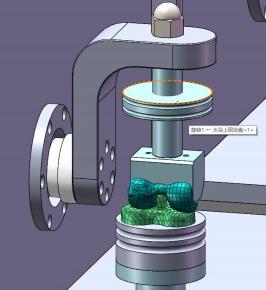
নমুনা লোডিং সিস্টেম হাঁটু জয়েন্টের ইমপ্লান্ট উপাদানগুলির জন্য মানুষের অবস্থার অধীনে গতির স্বাধীনতাকে অনুকরণ করে এটি ইনস্টল এবং স্থির করা হয়৷ এটিতে একটি মাউন্টিং সিট, একটি স্লাইডিং সিট, একটি নাইলন সিট, একটি রোলার, একটি স্লাইডিং হাতা ইত্যাদি রয়েছে৷
নির্দিষ্ট বাস্তবায়ন নিম্নরূপ:
হাঁটু জয়েন্ট পরিধান টুলিং ইনস্টলেশন তুলনামূলকভাবে জটিল। অনুগ্রহ করে এটি ডায়াগ্রাম অনুযায়ী কঠোরভাবে ইনস্টল করুন। উপরন্তু, সংশ্লিষ্ট চ্যানেল সংযুক্ত করা হয়.
তারগুলি সংযোগ করার সময় অনুগ্রহ করে সংশ্লিষ্ট তারের নম্বরটি ব্যবহার করুন৷
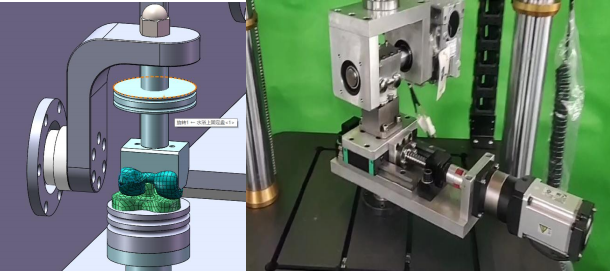
(চিত্রে দেখানো কাঠামোটি শুধুমাত্র আন্দোলনের নীতি প্রদর্শন করতে ব্যবহৃত হয়, প্রকৃত বস্তুটি প্রাধান্য পাবে)
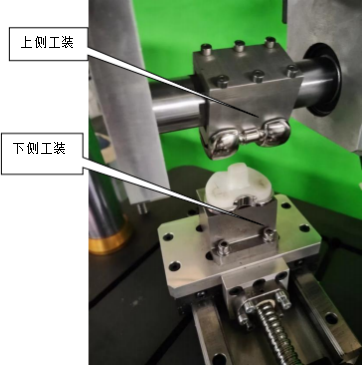

( চিত্রে দেখানো কাঠামোটি শুধুমাত্র আন্দোলনের নীতি প্রদর্শন করতে ব্যবহৃত হয়, প্রকৃত বস্তুটি প্রাধান্য পাবে)
পরীক্ষার প্রয়োজনীয়তা মেটাতে আপনাকে নমুনা অনুসারে উপরের এবং নীচের টুলিং পুনরায় প্রক্রিয়া করতে হবে৷ (প্রতিটি পণ্যের আকারের বিবরণ পরিবর্তিত হয়)

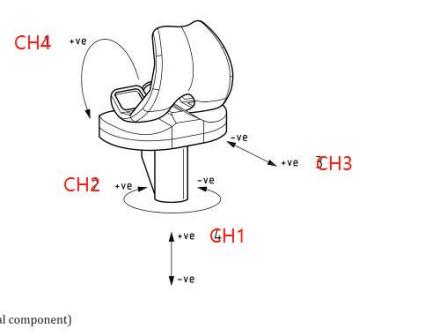
6. চ্যানেল নির্বাচন এবং সম্পর্কিত সমন্বয়
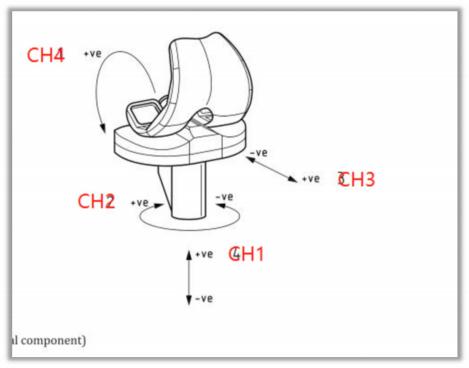
উপরের ছবির সাথে মিলিয়ে কোন চ্যানেলটি কাজ করছে তা চেক করে দেখুন। ISO 14243.3 চালানোর সময়, 1-4 আইল নির্বাচন করুন, চ্যানেল 5 পরবর্তী আপগ্রেডের জন্য একটি সম্প্রসারণ চ্যানেল। অন্যান্য একক-অক্ষ বা দ্বৈত-অক্ষ পরীক্ষার জন্য, অনুগ্রহ করে সংশ্লিষ্ট চ্যানেল নির্বাচন করুন।
কুইক আপ/আপ = ফাস্ট লোডিং/লোডিং
কুইক ডাউন/ডাউন = কুইক ডাউন/ডাউন
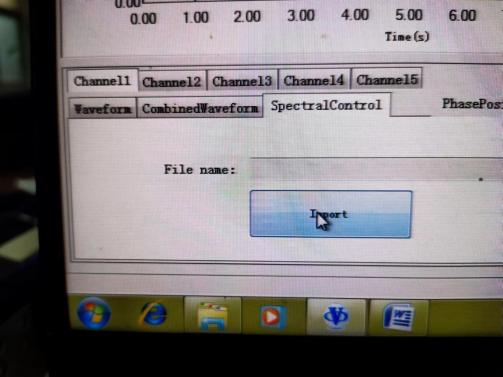
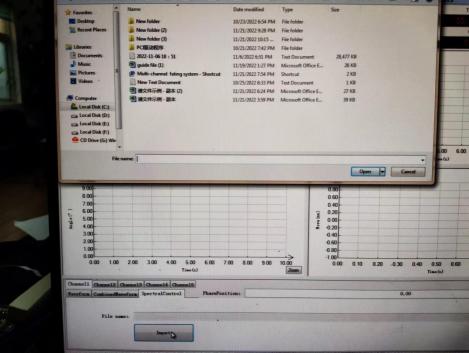
7. ISO 14243.3 এর সাথে সামঞ্জস্যপূর্ণ, চিত্রে দেখানো হিসাবে নিয়ন্ত্রণ তরঙ্গরূপ আমদানি করা প্রয়োজন:
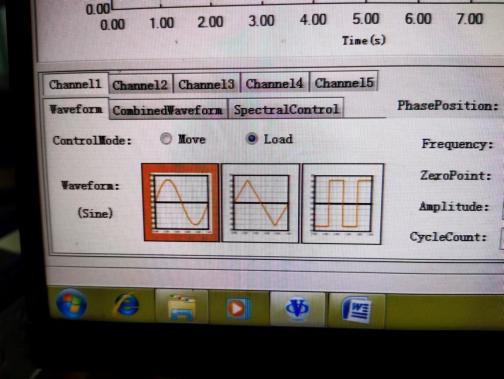
ফ্যাক্টরি প্রিসেট ওয়েভফর্ম নির্বাচন করুন। আপনি যদি একটি নতুন তরঙ্গরূপ বা ক্রিয়া সেট করতে চান তবে আপনি এই ফাইলটিতে তা করতে পারেন। পরিবর্তন করুন এবং অন্য নামে সংরক্ষণ করুন।
প্রতিটি চ্যানেলের বিস্তারিত সমন্বয়ের জন্য, অনুগ্রহ করে একক-চ্যানেল সফ্টওয়্যার ম্যানুয়াল পড়ুন।
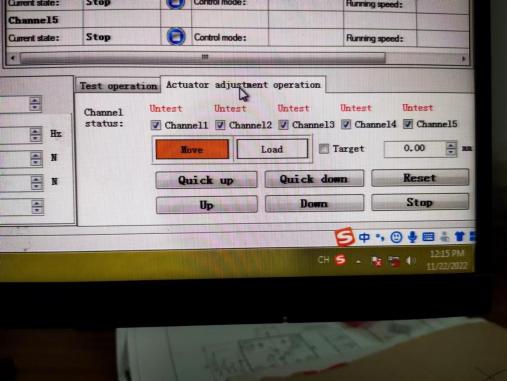
8. সুরক্ষা সম্পর্কে:
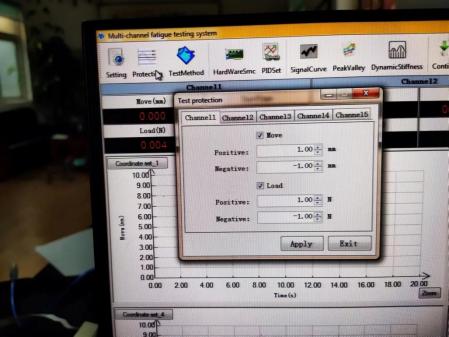
স্টার্ট ক্লিক করার পরে পরীক্ষাটি সরানো যায় না বা চালানো যাবে না, সুরক্ষা বিকল্পগুলিতে সহনশীলতার বাইরে কোনও প্যারামিটার আছে কিনা তা পরীক্ষা করুন৷
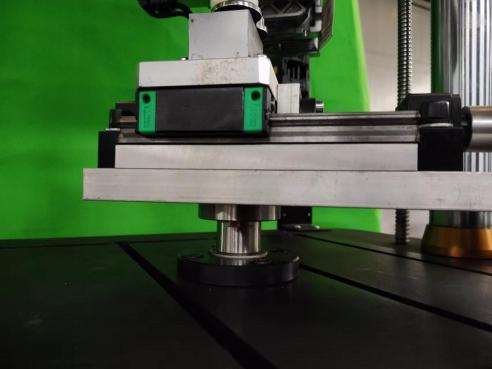
2.3 অক্ষীয় বল লোডিং সিস্টেম
এই মেশিনটি একটি স্প্রিং লোডিং কাঠামো গ্রহণ করে৷ লোডিং প্রক্রিয়াটি একটি স্টেপার মোটর দ্বারা চালিত হয়, যা একটি বৃত্তাকার আর্ক দাঁতযুক্ত বেল্ট, একটি সিঙ্ক্রোনাস কপিকল এবং একটি নির্ভুল বল স্ক্রু জোড়ার মাধ্যমে প্রেরণ করা হয় এবং বল প্রয়োগের আসনটি চালানোর জন্য একটি নির্ভুল লিনিয়ার মোশন গাইড রেল দ্বারা পরিচালিত হয়। বল প্রয়োগকারী আসনটি একটি স্প্রিং-লোড মেকানিজম দিয়ে স্থির করা হয়েছে, যা স্প্রিং সংকুচিত হওয়ার পরে স্লাইডিং প্ল্যাটফর্মে বল প্রয়োগ করে। রোলার নমুনার ঘর্ষণ পৃষ্ঠের মধ্যে পরীক্ষা বল গঠিত হয়। মোটর নিয়ন্ত্রণ করে ফোর্স সিটকে মহাকাশে এগিয়ে এবং পিছনে যাওয়ার জন্য চালিত করে, অর্থাৎ, পরীক্ষার শক্তি প্রয়োগ এবং মাত্রা নিয়ন্ত্রণ করা যায়। ফোর্স অ্যাপ্লিকেশন সিটের প্লেনে একটি লোড সেন্সর ইনস্টল করা হয়। বল সংকেত সংগ্রহ করুন। রৈখিক গতি ভারবহন গাইড পরীক্ষার বল প্রয়োগ এবং স্থায়িত্ব নিশ্চিত করে। স্প্রিং লোডিং অংশ লোড এবং আনলোড করা সহজ।
যখন টেস্ট ফোর্স লোড হতে শুরু করে, সেন্সর মাইক্রোকম্পিউটার কন্ট্রোল সিস্টেমে প্রিসেট প্রেসার ইনপুট করবে এবং প্রিসেট প্রেসার মাইক্রোকম্পিউটার তারপরে মোটরটিকে বিপরীত করতে নিয়ন্ত্রণ করে যতক্ষণ না সিস্টেমের চাপ প্রিসেট চাপের সাথে ভারসাম্যপূর্ণ হয়।
2.4 লোড সোকিং সিস্টেম
একটি নিমজ্জন তরল বাক্স, একটি হিটার, একটি তাপমাত্রা সেন্সর, একটি পেরিস্টালটিক পাম্প, একটি সিলিকন টিউব, ইত্যাদির
৷
গ্রাহকরা নমুনার প্রকৃত আকার অনুযায়ী নলাকার শেষ পৃষ্ঠের অবস্থানগত গর্ত প্রক্রিয়া করতে পারেন, এবং ক্ল্যাম্পিং কোণ সামঞ্জস্যযোগ্য। কোণ সামঞ্জস্য করার পরে, বাম পজিশনিং স্লাইডারটি লক করুন।


 {819029} {2019} {2016}
{819029} {2019} {2016}
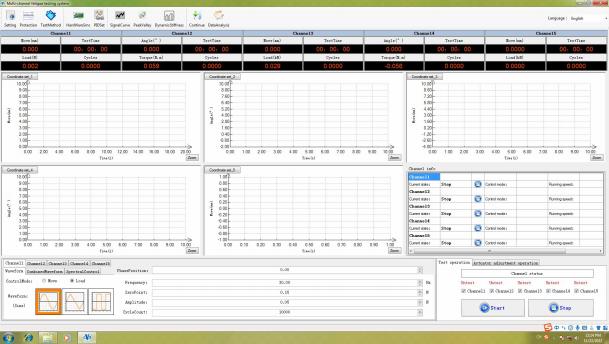
2.5 সফ্টওয়্যার নিয়ন্ত্রণ ব্যবস্থা
কন্ট্রোল সিস্টেমটি কন্ট্রোল মেশিনে ইনস্টল করা আছে এবং একটি যোগাযোগ তারের মাধ্যমে টেস্ট হোস্টের সাথে সংযুক্ত। সফটওয়্যার অপারেটিং এনভায়রনমেন্ট হল WINDOWS XP। কন্ট্রোল সফ্টওয়্যার হল একটি গ্রাফিকাল ইন্টারেক্টিভ অপারেশন ইন্টারফেস, যা সিস্টেমের শুরু এবং বন্ধ, অপারেটিং গতি, লোডিং ফোর্স, নিমজ্জন তরল তাপমাত্রা এবং সিস্টেম অপারেশন ডেটা যেমন অক্ষীয় বল, টর্ক, তাপমাত্রা, পরীক্ষার সময় নিয়ন্ত্রণ করার জন্য নির্দেশাবলী পাঠানোর জন্য দায়ী। পরীক্ষার সময়, ইত্যাদি। গণনা এবং প্রক্রিয়াকরণের পরে, পরীক্ষার বল-সময়, টর্ক-টাইম এবং অন্যান্য ডেটা কার্ভগুলি চার্ট আকারে আউটপুট হয়।
উপরের ছবির সাথে একত্রিত, কোন চ্যানেল কাজ করছে তা নিশ্চিত করতে চ্যানেলটি পরীক্ষা করুন৷ ISO 14243.3 চালানোর সময়, 1-4টি চ্যানেল নির্বাচন করুন, 5 t he চ্যানেল পরবর্তী আপগ্রেডের জন্য একটি সম্প্রসারণ চ্যানেল। অন্যান্য একক-অক্ষ বা দ্বি-অক্ষ পরীক্ষার জন্য, অনুগ্রহ করে সংশ্লিষ্ট চ্যানেল নির্বাচন করুন।
কুইক আপ/আপ = ফাস্ট লোডিং/লোডিং
দ্রুত ডাউন/ডাউন = দ্রুত আনইনস্টল/আনইন্সটল
7. ISO 14243.3 এর সাথে সামঞ্জস্যপূর্ণ, চিত্রে দেখানো হিসাবে নিয়ন্ত্রণ তরঙ্গরূপ আমদানি করা প্রয়োজন:
কারখানার পূর্বে তৈরি তরঙ্গরূপ নির্বাচন করুন। আপনি যদি একটি নতুন তরঙ্গরূপ বা কর্ম সেট করতে চান, আপনি এই ফাইলে এটি পরিবর্তন করতে পারেন। অন্য নামে সংরক্ষণ করুন।
প্রতিটি চ্যানেলের বিশদ সমন্বয়ের জন্য, অনুগ্রহ করে একক-চ্যানেল সফ্টওয়্যার ম্যানুয়াল পড়ুন।
8. সুরক্ষা সম্পর্কে:
স্টার্ট ক্লিক করার পরে পরীক্ষাটি সরানো যায় না বা চালানো যাবে না, সুরক্ষা বিকল্পগুলিতে সহনশীলতার বাইরে কোনও প্যারামিটার আছে কিনা তা পরীক্ষা করুন৷

 English
English
 Español
Español
 Português
Português
 русский
русский
 français
français
 日本語
日本語
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 ไทย
ไทย
 Polski
Polski
 한국어
한국어
 Svenska
Svenska
 magyar
magyar
 Malay
Malay
 বাংলা
বাংলা
 Dansk
Dansk
 Suomi
Suomi
 Pilipino
Pilipino
 Gaeilge
Gaeilge
 عربى
عربى
 norsk
norsk
 اردو
اردو
 čeština
čeština
 Ελληνικά
Ελληνικά
 Українська
Українська
 فارسی
فارسی
 தமிழ்
தமிழ்
 తెలుగు
తెలుగు
 नेपाली
नेपाली
 Burmese
Burmese
 български
български
 ລາວ
ລາວ
 Latine
Latine
 Қазақ
Қазақ
 Euskal
Euskal
 Azərbaycan
Azərbaycan
 slovenský
slovenský
 Македонски
Македонски
 Lietuvos
Lietuvos
 Eesti Keel
Eesti Keel
 Română
Română
 Slovenski
Slovenski
 मराठी
मराठी
 Српски
Српски
 עִברִית
עִברִית
 icelandic
icelandic
 Беларус
Беларус
 Монгол хэл
Монгол хэл
 Javanese
Javanese